Image d'un objet ponctuel à travers une lame
Introduction
Puisqu'une lame à faces planes et parallèles est assimilable optiquement à un milieu transparent et homogène limité par deux dioptres plans qui en sont ses deux faces, la recherche de l' image [1]d'un objet [2]à travers une lame peut être faite en considérant le problème successivement au niveau de chacun des dioptres. Examinons dans ces conditions les deux cas suivants:
l'objet est ponctuel et situé à distance finie de la lame.
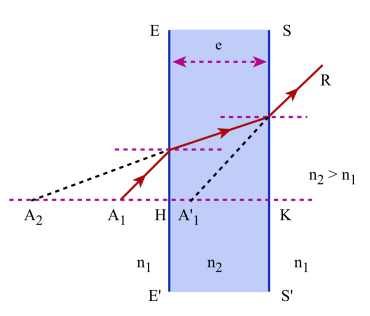
Considérons une lame d'indice n2 et d'épaisseur : \(\mathrm e=\overline{\mathrm{HK}}\) dont les faces EE' et SS' baignent dans le même milieu d'indice n1 tel que n2 > n1 . Soit par ailleurs un objet ponctuel A1 que l'on supposera réel [3]et qui, situé à distance finie, satisfait aux conditions du stigmatisme [4]approché. Son image à travers le dioptre d'entrée EE' est par suite un point virtuel A2 tel que :
\(\overline{\mathrm A_2\mathrm H}=\overline{\mathrm A_1\mathrm H}~\frac{\mathrm n_2}{\mathrm n_1}~~~~(1)~\) (formule du dioptre plan)
Plaçons-nous maintenant au niveau de la face de sortie SS' de la lame. Au regard de ce dioptre, l' image virtuelle [5]A2 de A1 joue le rôle d'un objet qui, optiquement parlant, appartient au milieu d'indice n2 ; A2 doit donc être considéré, vis à vis de SS' , comme un point réel car il se trouve, compte-tenu du sens de propagation de la lumière, en amont du dioptre SS', c'est à dire dans son espace objet [6]. Il en résulte que l'image A'1 de A2 est virtuelle ,et telle que :
\(\overline{\mathrm{A'}_1\mathrm K}=\overline{\mathrm A_2\mathrm K}~\frac{\mathrm n_1}{\mathrm n_2}~~~~(2)~\) (formule du dioptre plan)
Par combinaison des équations (1) et (2) , il est facile de déterminer pour la lame la position relative de l'image finale et virtuelle A'1 par rapport au point objet réel [3]A1 . On a en effet :
\(\overline{\mathrm{A'}_1\mathrm K}=\big(\overline{\mathrm A_2\mathrm H}+\overline{\mathrm{HK}}\big)~\frac{\mathrm n_1}{\mathrm n_2}=\big(\overline{\mathrm A_1\mathrm H}~\frac{\mathrm n_2}{\mathrm n_1}+\overline{\mathrm{HK}}\big)~\frac{\mathrm n_1}{\mathrm n_2}=\overline{\mathrm A_1\mathrm H}+\overline{\mathrm{HK}}~\frac{\mathrm n_1}{\mathrm n_2}=\overline{\mathrm A_1\mathrm K}+\overline{\mathrm{KH}}~\Big(1-\frac{\mathrm n_1}{\mathrm n_2}\Big)\)
soit \(\overline{\mathrm A_1\mathrm{A'}_1}=\overline{\mathrm{HK}}~\Big(1-\frac{\mathrm n_1}{\mathrm n_2}\Big)\) qui, rapportée aux données de la lame, s'écrit : \(\overline{\mathrm A_1\mathrm{A'}_1}=\mathrm e~\Big(1-\frac{\mathrm n_1}{\mathrm n_2}\Big)~~~~(3)\)
Cette relation algébrique est vraie quelle que soit la nature de l'objet ponctuel A1 ; elle mesure le déplacement apparent de l'objet lorsqu'il est vu par un observateur à travers une lame à faces planes et parallèles d'épaisseur e.
L'objet est ponctuel et situé à l'infini.
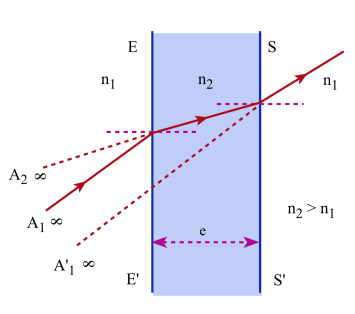
Dans ce cas l'image A'1 de A1 à travers la lame est située à l'infini. On sait en effet qu'à travers un dioptre plan, l'image d'un point à l'infini est elle même à l'infini. Dans ces conditions, à l'objet A1 correspond, par réfraction sur le dioptre d'entrée EE' une image A2 elle-même à l'infini. Cette dernière joue pour la face de sortie SS' de la lame le rôle d'un objet à l'infini dont l'image A'1 se situe également à l'infini, dans la même direction que l'objet A1 .Dans ce cas l'image A'1 de A1 à travers la lame est située à l'infini. On sait en effet qu'à travers un dioptre plan, l'image d'un point à l'infini est elle même à l'infini. Dans ces conditions, à l'objet A1 correspond, par réfraction sur le dioptre d'entrée EE' une image A2 elle-même à l'infini. Cette dernière joue pour la face de sortie SS' de la lame le rôle d'un objet à l'infini dont l'image A'1 se situe également à l'infini, dans la même direction que l'objet A1 .
Conclusion
En conclusion on notera que:
L'image d'un point source à travers une lame à faces planes et parallèles est toujours de nature différente de celle de l'objet; si l'un est réel, l'autre est virtuelle, et vice-versa.
La recherche de l'image ponctuelle d'un point source situé à distance finie se fait par application de la formule du dioptre plan sur la face d'entrée de la lame puis sur sa face de sortie.
L'image d'un point source à l'infini est un point lui-même rejeté à l'infini, dans la même direction.