b- Champ axial pour un instrument subjectif
Plaçons nous dans le cas d'un instrument qui donne une image virtuelle[1] d'un objet réel[2] situé à une distance finie (cas de la loupe, d'un oculaire positif, lunette, microscope).
On appelle profondeur de champ objet ou profondeur d'accommodation la distance l séparant les points objets extrêmes situés le long de l'axe dont les images sont aux limites de vision distincte de l'observateur accommodant convenablement.
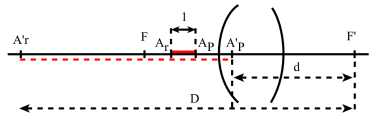
Nous supposerons que l'oeil est placé au foyer image[3] de l'instrument (cas le plus fréquent ). Soient \(A'_p\) et \(A'_r\) les images des punctums proximum \(A_p\) et remotum \(A_r\) à travers l'instrument.
Si nous appliquons les formules de Newton :
\(\overline{FA_p}=\frac{f.f'}{\overline{F'A'_p}}=-\frac{f.f'}d\)
\(\overline{FA_r}=\frac{f.f'}{\overline{F'A'_r}}=-\frac{f.f'}D\)
On en déduit : \(~l=\overline{A_rA_p}=\overline{FA_p}-\overline{FA_r}=-f.f'\Big(\frac1d-\frac1D\Big)=-A.f.f'~\) où \(~A=\Big(\frac1d-\frac1D\Big)~\) est l'amplitude d'accommodation qui dépend peu de l'observateur et qui vaut environ 4 dioptries.
Si l'objet est dans l'air alors \(f=-f'\) et \(l=A.f^2\). L’œil étant au foyer de l'instrument la puissance[4] de l'instrument est sa puissance intrinsèque : \(~P_i=\frac1f~\) et donc : \(~l=\frac A{P_i^2}~\).
La profondeur d'accommodation ou latitude de mise au point est inversement proportionnelle au carré de la puissance intrinsèque de l'instrument.