Association de deux systèmes centrés.
Introduction

Chacun des deux systèmes sera caractérisé par :
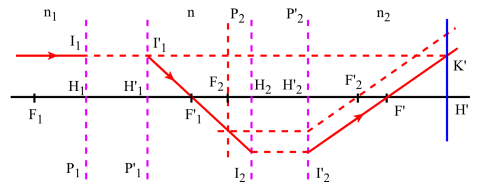
ses foyers objet et image F1 et F'1 pour le premier système, F2 et F'2 pour le deuxième système.
ses points principaux objet et image: H1 et H'1 pour le premier, H2 et H'2 pour le deuxième
ses distances focales [1]objet et image: \(f_{\mathit1}=\overline{H_{\mathit1}F_{\mathit1}}~\) et \(~f'_{\mathit1}=\overline{H'_{\mathit1}F'_{\mathit1}}\) pour le premier, et \(f_{\mathit2}=\overline{H_{\mathit2}F_{\mathit2}}~\) et \(~f'_{\mathit2}=\overline{H'_{\mathit2}F'_{\mathit2}}\) pour le deuxième.
Le premier système sépare les milieux d'indice n1 et n tandis que le deuxième sépare les milieux d'indice n et n2.
L'ensemble des deux systèmes est caractérisé par une distance définie par : \(\Delta=\overline{F'_{\mathit1}F_{\mathit2}}\) que l'on appelle intervalle optique.
Détermination du foyer objet :
Si l'on veut que le rayon émergent du second système soit parallèle à l'axe il faut que l'incident sur le deuxième système passe par le foyer objet F2. Le foyer objet F de l'ensemble des deux systèmes sera donc défini comme étant l'image de F2 à travers le premier système.
Les formules de Newton appliquées au premier système conduisent à : \(\overline{F_{\mathit1}F}~.~\overline{F'_{\mathit1}F_{\mathit2}}=f_{\mathit1}~.~f'_{\mathit1}\)
La position du foyer objet de l'ensemble des deux systèmes sera donc définie par :
\(\overline{F_{\mathit1}F}=\frac{f_{\mathit1}~.~f'_{\mathit1}}{\Delta}\)
Méthode : Détermination du foyer image :
Un rayon parallèle à l'axe du système et incident sur le premier système émergera de celui-ci en passant par le foyer image F'1. Le foyer image F' de l'ensemble des deux systèmes ne sera autre que l'image de F'1 à travers le deuxième système. En appliquant les formules de Newton on obtient : \(\overline{F_{\mathit2}F'_{\mathit1}}~.~\overline{F'_{\mathit2}F'}=f_{\mathit2}~.~f'_{\mathit2}\)
La position du foyer image F' de l'association des deux systèmes centrés sera donc définie par :
\(\overline{F'_{\mathit2}F'}=-\frac{f_{\mathit2}~.~f'_{\mathit2}}{\Delta}\)
Méthode : Détermination des plans principaux et des distances focales :
On a vu que le plan principal objet est le lieu des points d'intersection entre un rayon incident et un rayon émergent parallèle à l'axe du système centré. C'est donc le lieu des points K dont la projection sur l'axe est H qui constitue le point principal objet.
En appliquant le théorème de Thalès : \(\frac{\overline{FH}}{\overline{FH_{\mathit1}}}=\frac{\overline{HK}}{\overline{H_{\mathit1}I_{\mathit1}}}=\frac{\overline{H_{\mathit2}I_{\mathit2}}}{\overline{H'_{\mathit1}I'_{\mathit1}}}=\frac{\overline{F_{\mathit2}H_{\mathit2}}}{\overline{F_{\mathit2}H'_{\mathit1}}}\) soit :
\(\frac{\overline{HF}}{\overline{H_{\mathit1}F_{\mathit1}}+\overline{F_{\mathit1}F}}=\frac{f}{f_{\mathit1}+\frac{f_{\mathit1}.{f'}_{\mathit1}}{\Delta}}=\frac{\overline{H_{\mathit2}F_{\mathit2}}}{\overline{{H'}_{\mathit1}{F'}_{\mathit1}}+\overline{{F'}_{\mathit1}F_{\mathit2}}}=\frac{f_{\mathit2}}{{f'}_{\mathit1}+\Delta}\)
La distance focale objet f est donc définie par :
\(f=\overline{HF}=\frac{f_{\mathit1}.f_{\mathit2}}{\Delta}\)
De même on définit le plan principal image comme étant le lieu des points d'intersection entre un rayon incident parallèle à l'axe du système centré et le rayon émergent correspondant. C'est donc le lieu des points K' dont la projection sur l'axe est H' qui constitue le point principal image.
On aura de la même façon : \(\frac{\overline{F'H'}}{\overline{F'H'_{\mathit2}}}=\frac{\overline{H'K'}}{\overline{H'_{\mathit2}I'_{\mathit2}}}=\frac{\overline{H'_{\mathit1}I'_{\mathit1}}}{\overline{H_{\mathit2}I_{\mathit2}}}=\frac{\overline{F'_{\mathit1}H'_{\mathit1}}}{\overline{F'_{\mathit1}H'_{\mathit2}}}~\) soit :
\(\frac{\overline{H'F'}}{\overline{H'_{\mathit2}F'_{\mathit2}}~+~\overline{F'_{\mathit2}F'}}=\frac{f'}{f'_{\mathit2}-\frac{f_{\mathit2}.f'_{\mathit2}}{\Delta}}=\frac{\overline{H'_{\mathit1}F'_{\mathit1}}}{\overline{H_{\mathit2}F_{\mathit2}}~+~\overline{F_{\mathit2}F'_{\mathit1}}}=\frac{f'_{\mathit1}}{f_{\mathit2}-\Delta}\)
La distance focale image f ' est donc définie par:
\(f'=\overline{H'F'}=-\frac{f'_{\mathit1}.f'_{\mathit2}}{\Delta}\)
On remarquera que tout rayon incident passant par F1 émerge du premier système parallèlement à l'axe et converge après le second système en passant par F'2. Les points F1 et F'2 sont donc conjugués[2] par rapport à l'ensemble du système.
On a d'autre part les relations suivantes :
\(\frac{f'_{\mathit1}}{f_{\mathit1}}=-\frac{n}{n_{\mathit1}}~\) et \(~\frac{f'_{\mathit2}}{f_{\mathit2}}=-\frac{n_{\mathit2}}{n}\)
On en déduit la relation :
\(\frac{f'}{f}=-\frac{n_{\mathit2}}{n_{\mathit1}}\)
Méthode : Détermination de la vergence de l'ensemble des deux systèmes :
Les vergences de chacun des systèmes sont données par :
\(C_{\mathit1}=-\frac{n_{\mathit1}}{f_{\mathit1}}=\frac{n}{f'_{\mathit1}}\)
\(C_{\mathit2}=-\frac{n}{f_{\mathit2}}=\frac{n_{\mathit1}}{f'_{\mathit2}}\)
tandis que la vergence de l'ensemble des deux systèmes est donnée par :
\(C=\frac{n_{\mathit2}}{f}=-\frac{n_{\mathit2}.\Delta}{f'_{\mathit1}.f'_{\mathit2}}\)
mais \(~\Delta=\overline{F'_{\mathit1}F_{\mathit2}}=\overline{F'_{\mathit1}H'_{\mathit1}}~+~\overline{H'_{\mathit1}H_{\mathit2}}~+~\overline{H_{\mathit2}F_{\mathit2}}=-f'_{\mathit1}~+~f_{\mathit2}~+~\overline{H'_{\mathit1}H_{\mathit2}}\)
ce qui nous permet d'en déduire :
\(C=\frac{n_{\mathit2}}{f'_{\mathit2}}-\frac{n_{\mathit2}.f_{\mathit2}}{f'_{\mathit1}.f'_{\mathit2}}-\frac{n_{\mathit2}}{f'_{\mathit1}.f'_{\mathit2}}~\overline{H'_{\mathit1}H_{\mathit2}}\)
soit encore la formule de Gullstrand :
\(C=C_{\mathit1}~+~C_{\mathit2}~-~\frac{\overline{H'_{\mathit1}H_{\mathit2}}}{n}~C_{\mathit1}.C_{\mathit2}\)